|
||||
|
|
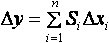
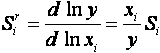
8. СПЕЦИАЛЬНЫЕ ВОПРОСЫ АНАЛИЗА АЭУ8.1. Оценка нелинейных искажений усилительных каскадовАналитический расчет НИ представляет собой довольно сложную задача и в полной мере может проводиться с помощью ЭВМ. Для каскадов на БТ возможна аналитическая оценка НИ для случая малых нелинейностей (Uвх одного порядка с φT=25.6 мВ) [15]. Обычно уровень НИ характеризуется коэффициентом гармоник Kг. Суммарный коэффициент гармоник равен  где Kг2 и Kг3 соответственно коэффициенты гармоник по второй и третьей гармоническим составляющим (составляющими более высокого порядка можно пренебречь ввиду их относительной малости). Коэффициенты гармоник Kг2 и Kг3, независимо от способа включения БТ, определяются из следующих соотношений:   где B — фактор связи (петлевое усиление). Данные выражения учитывают только нелинейность эмиттерного перехода и получены на основе разложения в ряд Тейлора функции тока эмиттера Iэ=Iэ0exp(Uвх/φT).  Фактор связи зависит от способа включения транзистора и вида обратной связи. Для каскада с ОЭ и ПООСТ имеем:  где Rг — сопротивление источника сигнала (или Rвых предыдущего каскада); Rос — сопротивление ПООСТ (см. подраздел 3.2, в случае отсутствия ПООСТ Rос=0). Для каскада с ОЭ и ∥ООСН  где Rэкв=Rк∥Rн, Rос — сопротивление ∥ООСН (см. подраздел 3.4). Для каскада с ОК  где Rэкв=Rэ∥Rн (см. подраздел 2.8). Для каскада с ОБ  Коэффициенты гармоник Kг2 и Kг3, независимо от способа включения ПТ, определяются из следующих соотношений:   где A — коэффициент, равный второму члену разложения выражения для нелинейной крутизны в ряд Тейлора, равный [15] A=Iси/U²отс, где Iси и Uотс см. рисунок 2.33. Фактор связи B зависит от способа включения транзистора и вида ООС. Для каскада с ОИ и ПООСТ имеем: B = S0(Rос + rи), где Rос — сопротивление ПООСТ (см. подраздел 3.2, в случае отсутствия ПООСТ Rос=0). Для каскада с ОИ и ∥ООСН имеем: B = S0RгRэкв/Rос, где Rэкв=Rс∥Rн, Rос — сопротивление ∥ООСН (см. подраздел 3.4). Для каскада с ОС B = S0(Rэкв + rи), где Rэкв=Rс∥Rн (см. подраздел 2.11). Для каскада с ОЗ B = S0((Rг∥Rи) + rи). В приведенных выше выражениях rи — сопротивление тела полупроводника в цепи истока, rи≈1/Sси, где Sси — см. подраздел 2.10, для маломощных ПТ rи=(10…200) Ом; Rи — см. рисунок 2.38. Приведенные соотношения для оценки Kг дают хороший результат в случае малых нелинейностей, в режиме больших нелинейностей следует воспользоваться известными машинными методами [4], или обратиться к графическим методам оценки НИ [6]. 8.2. Расчет устойчивости УУОценку устойчивости УУ, представленного эквивалентным четырехполюсником, описываемым Y-параметрами, удобно проводить с помощью определения инвариантного коэффициента устойчивости [2]:  При k>1 усилитель безусловно устойчив, при k<1 — потенциально неустойчив, т.е. существуют такие сочетания полных проводимостей нагрузки и источника сигнала, при которых возможно возникновение генерации. Устойчивость усилителя с учетом проводимости нагрузки и источника сигнала определяется следующим соотношением:  При k>1 усилитель безусловно устойчив, при k<1 — неустойчив, k=1 соответствует границе устойчивости. Эквивалентные Y-параметры усилителя определяются, согласно методике подраздела 2.3, в заданных точках диапазона рабочих частот. Использование инвариантного коэффициента устойчивости особенно удобно при машинном анализе УУ. Другие методы оценки устойчивости описаны в [6]. 8.3. Расчет шумовых характеристик УУШумы в УУ в основном определяются шумами активных сопротивлений и усилительных элементов, расположенных во входных каскадах. Наибольший вклад в мощность шума, создаваемого усилительным каскадом, вносит усилительный элемент. Наличие собственных источников шумов ограничивает возможность усиления слабых сигналов. В зависимости от природы возникновения, собственные шумы транзистора подразделяются на тепловые, дробовые, шумы токораспределения, избыточные и т.д. Тепловые шумы обусловлены беспорядочными перемещениями свободных носителей заряда в проводниках и полупроводниках, дробовые — дискретностью заряда носителей (электронов и "дырок") и случайным характером инжекции и экстракции их через p-n-переходы. Шум токораспределения вызывается флуктуациями распределения тока эмиттера на токи коллектора и базы. Все вышеперечисленные виды шумов имеют равномерный спектр. Природа избыточных шумов до конца еще не выяснена. Обычно их связывают с флуктуациями состояния поверхности полупроводников. Спектральная плотность этих шумов обратно пропорциональна частоте, что послужило поводом для названия их шумами типа 1/f. Еще их называют фликкер-шумами, шумами мерцания и контактными шумами. Шумы типа 1/f сильно возрастают при дефектах в кристаллической решетке полупроводника. Наиболее весомый вклад в мощность шумов усилительных элементов вносят тепловые шумы. Шумы активных элементов можно представить в виде источника напряжения (рисунок 8.1а) или источника тока (рисунок 8.1б). 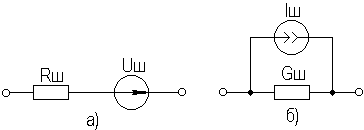 Рисунок 8.1. Эквивалентные схемы активного шумового сопротивления Соответствующие значения ЭДС и тока этих источников следующие (см. подраздел 2.2):  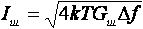 где Δf — полоса рабочих частот; k=1,38·10-23 — постоянная Больцмана; T — температура в градусах Кельвина; Rш — шумовое сопротивление, Gш — шумовая проводимость, Gш=Rш-1. Для стандартной температуры Т=290°K эти формулы можно упростить:   Спектральные плотности шумов по напряжению и току составляют [17]: 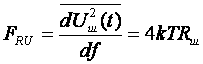 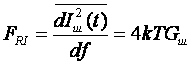 где Любой активный элемент можно представить шумящим четырехполюсником (рисунок 8.2) и по данным формулам рассчитать его шумовые характеристики. 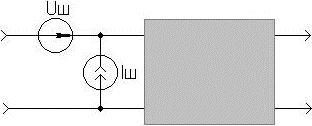 Рисунок 8.2. Шумящий четырехполюсник В [16] приведены выражения для шумовых параметров БТ и ПТ нормированных спектральных плотностей шумов по напряжению Rш=FRU/4kT, по току Gш=FRI/4kT и взаимной спектральной плотности Fш, представляющих собой соответственно шумовое сопротивление, шумовую проводимость и взаимную спектральную плотность шумов. Для БТ, включенного по схеме с ОЭ: Rш = rб + 0,2Iбrб2 + 0,02IкS0-2, Gш = 0,2Iб + 0,02Iкg2S0-2, Fш = 1 + 0,02Iбrб + 0,02IкgS0-2, где Iб и Iк в миллиамперах, g и S0 в миллисименсах. При учете фликкер-шумов для частот f≥10Гц в данных выражениях следует принять: I'б = (1 + 500/f)Iб, I'к = (1 + 500/f)Iк. Для ПТ, включенного с ОИ: Rш = 0,75/S0, Gш = Rшω²C²зи = 40Rшf²C²зи, Fш = 1 + ωCзиRш = 1 + 6,28·CзиRш. Данные формулы применимы и для других схем включения транзисторов. Полагая равномерным спектральные плотности шумов, согласно [16] можно получить выражение для коэффициента шума каскада: F = (Rг + Rш + GшRг + 2FшRг)/Rг. Исследуя это выражение на экстремум, определяем оптимальное сопротивление источника сигнала Rг opt, при котором коэффициент шума каскада F минимален:  При этом в большинстве случаев оказывается, что Rг opt не совпадает с Rг, оптимальным с точки зрения получения необходимой fв каскада (Rг opt>Rг). Выходом из данной ситуации является включение между первым и вторым каскадами цепи противошумовой коррекции (рисунок 8.3). 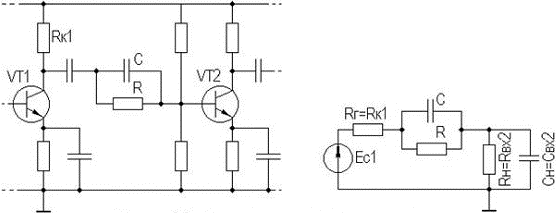 Рисунок 8.3. Простая противошумовая коррекция Введением противошумовой коррекции добиваются повышения коэффициента передачи каскадов в области ВЧ (путем внесения корректирующей цепью затухания на НЧ и СЧ), компенсируя тем самым спад усиления на ВЧ за счет высокоомного Rг opt. Приближенно параметры противошумовой коррекции можно определить из равенства ее постоянной времени RC постоянной времени τв некорректированного каскада. Расчет шумов каскадно соединенных четырехполюсников (многокаскадного усилителя) обычно сводится к расчету коэффициента шума входной цепи и входного каскада. Первый каскад в таком усилителе работает в малошумящем режиме, а второй и другие каскады в обычном режиме. Расчет шумов в общем случае представляет собой сложную задачу, решаемую с помощью ЭВМ. Для ряда частных случаев шумовые параметры могут бить рассчитаны по соотношениям, приведенным в [16]. 8.4. Анализ чувствительностиЧувствительностью называется реакция различных устройств на изменение параметров ее компонент. Коэффициент чувствительности (функция чувствительности или просто чувствительность) представляет собой количественную оценку изменения параметров устройства (в т.ч. и АЭУ) при заданном изменении параметров его компонент. Необходимость расчета функции чувствительности возникает при необходимости учета влияния на характеристики АЭУ факторов окружающей среды (температуры, радиации и т.д.), при расчете требуемых допусков на параметры компонент, при определении процента выхода ИМС, в задачах оптимизации, моделирования и т.д. Функция чувствительности Si параметра устройства y к изменению параметра компонента xi определяется как частная производная  Данное выражение получено на основе разложения в ряд Тейлора функции нескольких переменных  Пренебрегая частными производными второго и более порядка, получаем связь функции чувствительности и отклонения параметра  Существуют разновидности функции чувствительности: ◆ абсолютная чувствительность ◆ относительная чувствительность ◆ полуотносительные чувствительности Выбор вида функции чувствительности определяется видом решаемой задачи, например, для комплексного коэффициента передачи  Для простых схем вычисление функции чувствительности может осуществляться прямым дифференцированием схемной функции, представленной в аналитическом виде. Для сложных схем, получение аналитического выражения схемной функции представляет собой сложную задачу, возможно применение прямого расчета функции чувствительности через приращения. В этом случае необходимо проводить n анализов схемы, что для сложных схем весьма нерационально. Существует косвенный метод расчета чувствительности по передаточным функциям, предложенный Быховским [17]. Согласно этому методу, функция чувствительности, например, прямого коэффициента передачи равна произведению функций передачи с входа схемы до элемента, относительно которого ищется чувствительность, и передаточной функции "элемент — выход схемы" (рисунок 8.4а). 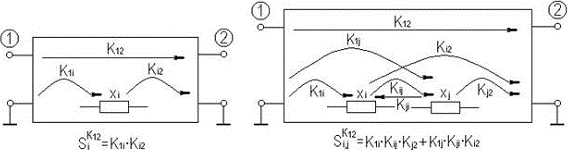 Рисунок 8.4. Косвенный метод расчёта функций чувствительности Так как расчет функции чувствительности сводится к расчету передаточных функций, то для их нахождения возможно применение, например, обобщенного метода узловых потенциалов. Косвенный метод расчета по передаточным функциям позволяет находить функции чувствительности более высоких порядков. На рисунке 8.4б проиллюстрировано нахождение функции чувствительности второго порядка. В общем же существует n! путей передачи сигнала, каждый из которых содержит n+1 сомножителей. Ниже описывается метод расчета функции чувствительности, сочетающий прямой метод дифференцирования и косвенный по передаточным функциям, позволяющий за один анализ находить чувствительность к n элементам схемы [18]. Рассмотрим данный способ на примерах получения выражений для абсолютной чувствительности первого порядка S-параметров электронных схем, описанных матрицей проводимости [Y]. В матричном представлении характеристики электронных схем, в том числе и параметры рассеяния [S], определяются в виде отношений алгебраических дополнений матрицы [Y] (см. подраздел 7.2). Изменяемый параметр входит при этом в некоторые элементы алгебраических дополнений. Определение функции чувствительности сводится в этом случае к нахождению производных от отношений алгебраических дополнений (или алгебраических дополнений и определителя) по элементам, в которых содержится изменяемый параметр. В случае, когда изменяемый параметр входит в элементы дополнений определителя функционально, чувствительность определяется как сложная производная. Для определения производных алгебраических дополнений по изменяемым параметрам входящих в них элементов воспользуемся теоремой, утверждающей, что производная определителя по какому-либо элементу равна алгебраическому дополнению этого элемента. Доказательство теоремы основано на разложении определителя по Лапласу 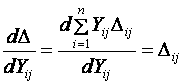 Общее выражение для S-параметров через алгебраические дополнения имеет вид (см. подраздел 7.2) Sij = kijΔji/Δ – δij. Определим функции чувствительности параметров рассеяния к пассивному двухполюснику yo включенному между произвольными узлами k и l (см. рисунок 8.5а) 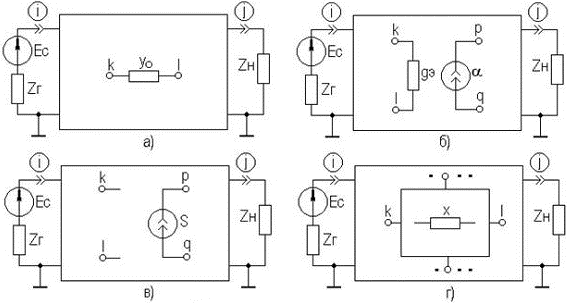 Рисунок 8.5. Расчёт чувствительности S-параметров SSijy0 = dSij/dy0 = kij(Δji(k+l)(k+l)Δ – Δ(k+l)(k+l)Δji)/Δ² = –kijΔj(k+l)Δ(k+l)i/Δ² = –kij[(Δjk – Δjl)(Δki – Δli)]/Δ² При получении данного и последующих выражений используются следующие матричные соотношения [3]: Δ(i+j)(k+l) = Δi(k+l) + Δj(k+l) = (Δik – Δil) + (Δjk – Δjl), ΔijΔkl – ΔilΔkl = ΔΔij,kl. Для электронных схем, содержащих БТ, моделируемые ИТУТ (см. подраздел 2.4.1), определим чувствительность S-параметров к проводимости управляющей ветви gэ=1/rэ и параметру управляемого источника a включенных соответственно между узлами k, l, и p, q (рисунок 8.5б): SSijgэ = dSij/dgэ = kij[(Δji(k+l)(k+l)Δ + αΔij(k+l)(p+q))Δ – (Δ(k+l)(k+l)Δ+αΔ(k+l)(p+q)Δij])/Δ² = –kijΔ(k+l)i(Δj(k+l) + αΔj(p+q))/Δ² = –kij(Δki – Δli)[(Δjk – Δjl)+ α(Δjp - Δjq)/Δ², SSijα = dSij/dα = kij(Δji(k+l)(p+q)Δ – Δ(k+l)(p+q)Δji)/Δ² = –kijΔj(p+q)Δ(k+l)i/Δ² = –kij[(Δjp – Δjq)(Δki – Δli)]/Δ². Если электронная схема содержит ПТ, моделируемые ИТУН (см. подраздел 2.4.1), то чувствительность параметров рассеяния к крутизне S, включенной между узлами p, q при узлах управления k, l (рисунок 8.5в), равна SSijS = dSij/dS = kij(Δji(k+l)(p+q)Δ – Δ(k+l)(p+q)Δji)/Δ² = –kijΔj(k+l)Δ(p+q)i/Δ² = –kij[(Δjk – Δjl)(Δpi – Δqi)]/Δ². Чувствительность параметров рассеяния к любому Y-параметру подсхемы (рисунок 8.5г), например, ykl, будет равна SSijykl = dSij/dykl = kij(Δji,klΔ – ΔklΔij)/Δ² = –kijΔjlΔki/Δ². При известной чувствительности ykl к параметру элемента подсхемы x (см. рисунок 8.5г) чувствительность S-параметров полной схемы к этому параметру, в соответствии с понятием сложной производной, выразится как SSijx = (dSij/dykl)(dykl/dx) = SSijykl·Syklx. Последнее выражение указывает на возможность применения метода подсхем при анализе чувствительности сложных электронных схем. Зная связь параметров рассеяния с вторичными параметрами электронных схем (KU, Zвх, Zвых и др.) и чувствительность параметров рассеяния к изменению элементов схемы, возможно нахождение функций чувствительности вторичных параметров к изменению этих элементов. Например, для коэффициента передачи по напряжению с i-го на j-й узел Kij=Sji/(1+S11) чувствительность к изменению параметра x (полагая, что Sij=f(x) и Sii=φ(x)) получаем SKijx = dKij/dx = [SSijx(1 + Sii) – SSiixSij]/(1 + Sii)². Аналогично для Zвх(вых) (Zii(jj)) имеем Zii(jj) = Zг(н)·(1 + Sii(jj))/(1 – Sii(jj)); SZii(jj)x = dZii(jj)/dx = –2Zг(н)·SSii(jj)x·Sii(jj)/(1 – Sii(jj))². Данный способ столь же эффективно может быть использован при определении чувствительности более высоких порядков для всевозможных характеристик электронных схем. Реализация полученных таким образом алгоритмов расчета чувствительности сводится к вычислению и перебору соответствующих алгебраических дополнений, что хорошо сочетается с нахождением других малосигнальных характеристик электронных схем. 8.5. Машинные методы анализа АЭУВ подразделе 2.3 приведена основная идея обобщенного метода узловых потенциалов, на основе которого были получены большинство соотношений для эскизного расчета усилительных каскадов. Однако наряду с несомненными достоинствами данного метода (простота программирования, малая размерность получаемой матрицы проводимости Y, n*n, где n- количество узлов схемы без опорного), данный метод имеет ряд существенных недостатков. В первую очередь следует отметить невозможность представления в виде проводимости некоторых идеальных моделей электронных схем (короткозамкнутых ветвей, источников напряжения, зависимых источников, управляемых током и т.д.). Кроме того, представление индуктивности проводимостью неудобно при временном анализе схем, что связано с преобразованием Лапласа (оператор Лапласа p должен быть в числителе для того, чтобы система алгебраических уравнений и полученная в результате преобразования система дифференциальных уравнений имела одинаковые коэффициенты). В настоящее время наибольшее распространение получили топологические методы формирования системы уравнений электрической цепи, наиболее общим из которых является табличный [4]. В этом методе все уравнения, описывающие цепь, включаются в общую систему уравнений, содержащую уравнения Кирхгофа для токов, напряжений и компонентные уравнения. Уравнения Кирхгофа для токов можно представить в виде AIв = 0, где A — матрица инценденции [4], описывающая топологию цепи, Iв — вектор тока ветвей. Уравнения Кирхгофа для напряжений имеют вид Vв – AtVп = 0, где Vв и Vп — соответственно, вектора напряжений ветвей и узловых потенциалов, At — транспонированная матрица инценденции A. В общем случае уравнения, описывающие элементы цепи, можно представить в следующей форме: YвBв + ZвIв = Wв, где Yв и Zв — соответственно, квазидиагональные матрицы проводимости и сопротивления ветвей, Wв — вектор, куда входят независимые источники напряжения и тока, а также начальные напряжения и токи на конденсаторах и индуктивностях. Запишем приведенные уравнения в следующей последовательности: Vв – AtVп = 0; YвBв + ZвIв = Wв; AIв = 0; и представим в матричной форме 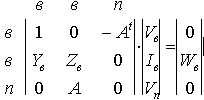 или в общем виде TX=W. Табличный метод имеет главным образом теоретическое значение, поскольку наряду с основным достоинством, выражающимся в том, что возможно нахождение всех токов и напряжений ветвей и узловых потенциалов, имеет ряд существенных недостатков. В первую очередь следует отметить избыточность метода, приводящую к большой размерности матрицы T. Далее следует отметить, что многие идеальные управляемые источники приводят к появлению лишних переменных. Например, входной ток управляемых напряжением источников тока и напряжения, а также входное напряжение управляемых током источников тока и напряжения равны нулю, но в данном методе они рассматриваются как переменные. В практическом плане чаще всего используется модификация табличного метода — модифицированный узловой метод с проверкой [4]. Идея данного метода заключается в разделении элементов на группы; одна группа сформирована из элементов, которые описываются помощью проводимостей, для элементов второй группы такое описание невозможно. Поскольку через токи ветвей первой группы можно выразить напряжения ветвей, а напряжения ветвей через узловые потенциалы, то можно исключить из табличных уравнений все напряжения ветвей, а для элементов первой группы еще и токи ветвей. При введении дополнительных уравнений для токов в ветвях с элементами второй группы производится проверка на наличие заранее известных (нулевых) переменных. В результате такого преобразования получим уравнения модифицированного узлового метода с проверкой 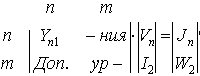 или в общем виде TmX=W, где n — размерность матрицы проводимости Yn1 элементов первой группы (n — число узлов схемы без нулевого); m — число дополнительных уравнений для элементов второй группы; Jn — вектор независимых источников тока; I2 — вектор токов ветвей элементов второй группы; W2 — вектор, куда входят независимые источники напряжения, а также начальные напряжения и токи на конденсаторах и индуктивностях, представленных элементами второй группы. Для упрощения программирования обычно представляют матрицу коэффициентов системы уравнений модифицированного узлового метода Tm в виде суммы двух матриц размерностью (n+m)*(n+m) Tm = G + pC. В матрицу G вносят все активные проводимости и коэффициенты, соответствующие частотно-независимым элементам, а в матрицу C — все частотнозависимые элементы, причем индуктивности обычно представляют элементом второй группы, т.е. сопротивлением. Далее находят решение данной системы уравнений, используя алгоритмы Гаусса-Жордана либо L/U-разложения [4]. При частотном анализе электронных схем оператор p заменяется на jω, организуется цикл по частоте, внутри которого для каждой частотной точки формируется система уравнений, которая решается относительно интересующих напряжений и токов. При временном анализе линейных электронных схем возможно непосредственно использовать модифицированную узловую форму уравнений (G + pC)X = W. После перехода во временную область получим Gx + Cx' = W, или Cx' = W – Gx. Решение полученной системы дифференциальных уравнений находится путем численного интегрирования. Одними из эффективных методов численного интегрирования являются методы, опирающиеся на линейные многошаговые формулы [4], к простейшим из которых относятся формулы Эйлера (прямая и обратная) и формула трапеций. Разбив временной интервал [0,T] на конечное число отрезков h и положив tn+1=tn+h, для каждого момента времени tn можно найти приближение xn к истинному решению x(tn) путем применения линейных многошаговых формул: xn+1 = xn + hx'n (прямая формула Эйлера); xn+1 = xn + hx'n+1 (обратная формула Эйлера); xn+1 = xn + (h/2)(x'n + x'n+1) (формула трапеций). Нахождение x'n+1 для (n+1)-го шага вычислений возможно путем применения прямой формулы Эйлера. Поскольку напряжение на конденсаторе и ток, протекающий через него связаны соотношением i=CdV/dt, а для индуктивности имеем V=Ldi/dt, то применение обратной формулы Эйлера равноценно переходу от емкостей и индуктивностей к их эквивалентным схемам, показанным на рисунке 8.6, в результате чего цепь становится резистивной. Такие модели индуктивности и емкости носят название сеточных (сопровождающих, дискретных) моделей. 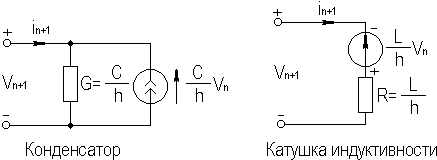 Рисунок 8.6. Сеточные модели для обратной формулы Эйлера Отыскание рабочей точки или расчет по постоянному току является первым шагом при нелинейном анализе УУ. Анализ характеристик по постоянному току схем, содержащих нелинейные сопротивления, сводится к решению системы нелинейных уравнений вида f(x)=0. Поскольку законы Кирхгофа применимы не только к линейным, но и к нелинейным элементам, для формирования системы уравнений f(x) возможно использование уже рассмотренных табличных методов. Структура получаемых табличных уравнений будет рассмотрена ниже. Для решения системы нелинейных уравнений f(x) применяется метод Ньютона-Рафсона [4]. Метод предусматривает использование начального приближения x0, проведение итерационной процедуры и, если величина |(xn+1–xn)/xn+1| достаточно мала, констатацию факта сходимости (n- количество итераций): xn+1 = xn – J-1f(xn), где J — якобиан (матрица Якоби) размерностью (m*m) 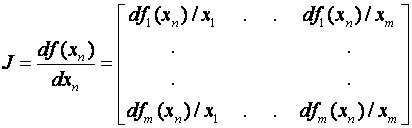 В процессе итерационной обработки данной системы уравнений на каждом этапе итерации могут быть получены значения f(xn) и J; это эквивалентно решению линейного уравнения в форме J(xn+1) – xn) = –f(xn). Другими словами, решение нелинейных уравнений можно интерпретировать как повторное решение линейных уравнений на каждом этапе итерационного процесса. Структура якобиана внешне совпадает с табличными уравнениями линейных цепей, которые преобразованы с учетом расчета по постоянному току — убраны конденсаторы и закорочены катушки индуктивности. Пусть табличные уравнения заданы в следующей форме: Vв – AtVп = 0; p(Vв,iв) = W; AIв = 0; Система уравнений p(Vв,iв) = W определяет связь между токами и напряжениями ветвей в неявной форме, некоторые из этих зависимостей могут быть линейными. Матрица Якоби на n-й итерации будет иметь вид 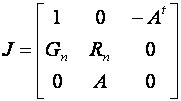 где Для формирования якобиана возможно использование различных модификаций табличного метода, в том числе и модифицированного узлового с проверкой. Результат анализа схемы по постоянному току (режим по постоянному току) может быть использован в качестве начального приближения при временном анализе нелинейных электронных схем. Нелинейные уравнения легко включаются в уравнения цепи, составленные табличным или модифицированным узловым методом. Линейные элементы, как и прежде, линейными компонентными уравнениями. Для нелинейных уравнений характерны уравнения в неявной форме, хотя иногда нелинейности можно описать и в явной форме. Нелинейные емкости и индуктивности лучше всего описывать с помощью дополнительных переменных — электрических зарядов и магнитных потоков соответственно, которые должны быть введены в вектор неизвестных. Если это проделать, то уравнения, записанные как табличным, так и модифицированным узловым методами можно представить в следующем виде: f(x', x, W, t) ≣ Ex' + Gx +p(x) = 0, где E и G — постоянные матрицы, а все нелинейности сведены в вектор p(x). Полученная система дифференциальных уравнений решается путем интегрирования с использованием формулы дифференцирования назад [4] и алгоритма Ньютона-Рафсона, для чего формируется якобиан. В целом структура якобиана для линейной и нелинейной цепи идентична, отличие между ними в том, что нелинейная емкость (индуктивность) будет представлена двумя уравнениями, а заряд q (поток f) станет еще одним неизвестным. Однако и для линейных емкостей и индуктивностей можно ввести заряды и магнитные потоки в качестве переменных, что приведет к совпадению якобиана и матрицы системы уравнений. Любая нелинейная проводимость появится в якобиане аналогично линейной проводимости в матрице C модифицированного узлового метода. Таким образом становится возможным единый подход к формированию и решению уравнений линейных и нелинейных цепей с целью получения их временных и частотных характеристик, что и успешно реализуется в современных пакетах схемотехнического проектирования. Более подробно перечисленные методы, а также другие вопросы анализа электронных цепей приведены в [4]. В [19] описан один из пакетов схемотехнического проектирования Electronics Workbench. |
|
||
|
Главная | В избранное | Наш E-MAIL | Прислать материал | Нашёл ошибку | Наверх |
||||
|
|
||||
 ,
,  — дифференциалы от среднеквадратичных напряжений и токов шумов как случайных функций времени t, действующих в полосе пропускания df.
— дифференциалы от среднеквадратичных напряжений и токов шумов как случайных функций времени t, действующих в полосе пропускания df. , где
, где 
 ;
; , относительное отклонение равно
, относительное отклонение равно  ;
; ,
,  .
. относительная чувствительность равна относительной чувствительности модуля (действительная часть) и полуотносительной чувствительности фазы (мнимая часть):
относительная чувствительность равна относительной чувствительности модуля (действительная часть) и полуотносительной чувствительности фазы (мнимая часть): ; где
; где  .
.